- +7 (499) 113-70-33
- Серпухов, 1-я Московская улица, 44
- info@robteh.ru
- Официальный интегратор
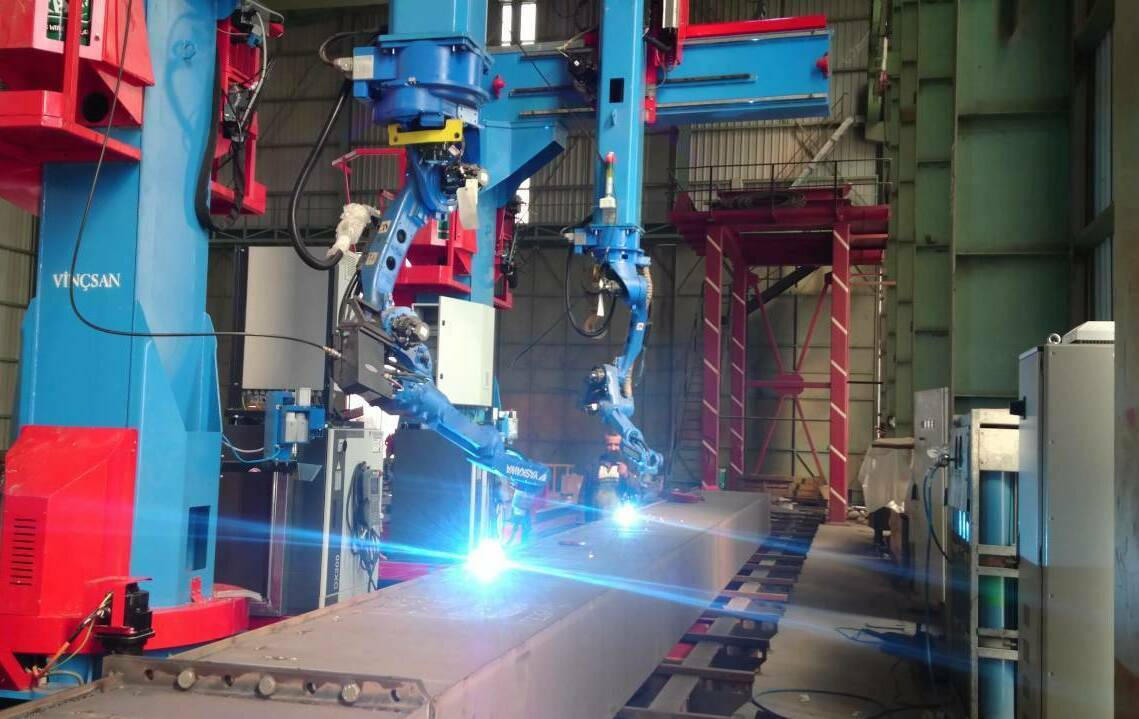
ПОРТАЛЬНАЯ СВАРКА РОБОТОМ



Комплекс портальной сварки ArcWorld Liner
Предназначен для сварочных решений при сварке крупногабаритных изделий, таких как экскаваторы, контейнеры, ЖД вагоны, сельхозтехника и иные крупные объекты. Также порталы обеспечивают удобное расположение робота для обслуживания станков. Порталы и колонны оснащены сервоприводами YASKAWA и полностью синхронизированы с контроллером робота, а значит управляются с одного пульта.
Комплексы ArcWorldLiner относятся к не стандартным решениям и обладают рядом особенностей. Данные проекты выполняются по индивидуальному заказу каждого клиента, что позволяет максимально эффективно использовать роботизированный комплекс для выполнения необходимых задач качественно и быстро.
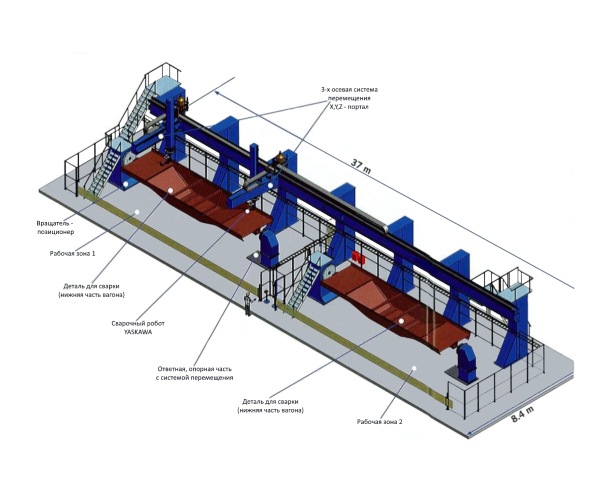
Основное преимущество комплекса, заключается в расширенных возможностях перемещения робота по дополнительным координатам. Существует несколько типов систем перемещения: консольные, линейные, портальные и т.д.
Идеальное решение для сварки деталей с очень большим весом или габаритами.
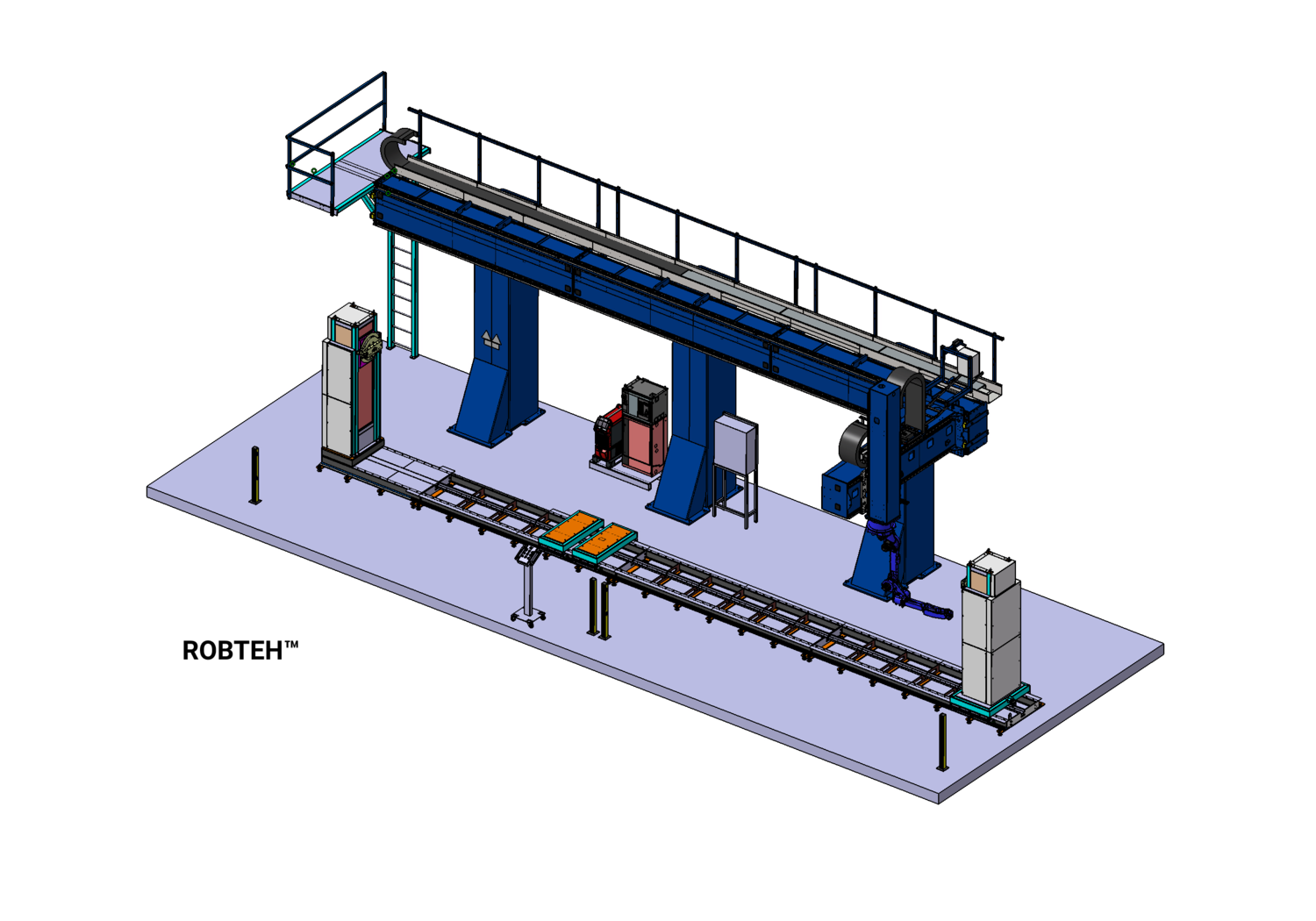
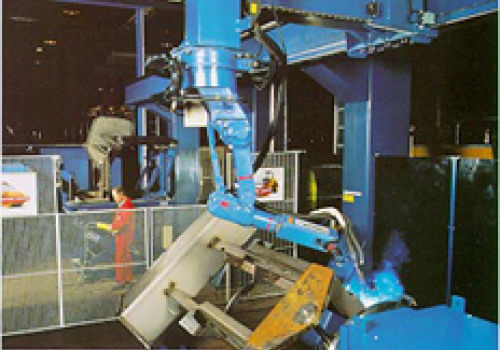
Реализованный проект по роботизированной портальной сварке ROBTEH™
Особенности портального сварочного комплекса


1. Выдающаяся скорость работы
2. Один или несколько роботов
3. Экономическая эффективность
4. Перемещение по трем координатам
5. Расширенная рабочая зона портала
6. Дополнительный уровень безопасности
Увеличенная зона досягаемости робота
Роботизированная сварка портального типа Yaskawa
Обработка видео...
Портальная сварка роботом
Обработка видео...
Технические характеристики сварочных порталов и параметры перемещения робота
| Данные | TSG-y | TSG-yx | TSG-yz | TSG-yxz | |||
| y-ось | |||||||
| Макс. длина перемещения одного модуля, мм: | L-975 | L-1100 | L-1100 | L-1100 | |||
| Стандартная длина перемещения (L), шаг 2 метра, мм | 4-36 | 4-36 | 4-36 | 4-36 | |||
| Стандартная высота колон (Н),м: | 4 | 4 | 4 | 4 | |||
| Макс. скорость перемещения, при ПВ 50%, м/с: | 1.5 | 1.5 | 1.5 | 1.5 | |||
| Ускорение, м/с²: | 1.5 | 1.5 | 1.5 | 1.5 | |||
| Скорость перемещения 0.5 / 1.0, м/с: | 1.24/1.72 | 1.24/1.72 | 1.24/1.72 | 1.24/1.72 | |||
| Скорость перемещения 1.2/1.5, м/с: | 1.87/2.08 | 1.87/2.08 | 1.87/2.08 | 1.87/2.08 | |||
| x-ось | |||||||
| Макс. длина перемещения одного модуля, мм: | - | 2000 | - | 2000 | |||
| Макс. скорость перемещения, при ПВ 50%, м/с: | - | 1.5 | - | 1.5 | |||
| Ускорение, м/с²: | - | 2.5 | - | 2.5 | |||
| Скорость перемещения 0.5 / 1.0, м/с: | - | 0.98/1.35 | - | 0.98/1.35 | |||
| Скорость перемещения 1.2/1.5, м/с: | - | 1.49/1.69 | - | 1.49/1.69 | |||
| z-ось | |||||||
| Макс. длина перемещения одного модуля, мм: | - | - | 1500 | 1500 | |||
| Макс. скорость перемещения, при ПВ 50%, м/с: | - | - | 0.5 | 0.5 | |||
| Ускорение, м/с²: | - | - | 1.25 | 1.25 | |||
| Скорость перемещения 0.5 / 1.0, м/с: | - | - | 1.33/2.31 | 1.33/2.31 | |||
| Скорость перемещения 1.2/1.5, м/с: | - | - | 2.70/3.29 | 2.70/3.29 | |||
Дополнительные опции портальной конструкции для сварки роботом:
- Высота столбов (Н): 4300, 4600 или 4900 мм;
- Дополнительные каретки;
- Несколько рабочих зон;
- Дополнительные кронштейны для TSG-y оси;
- Доп место для бухты со сварочной проволокой;
Портальная сварка минипогрузчика
Обработка видео...



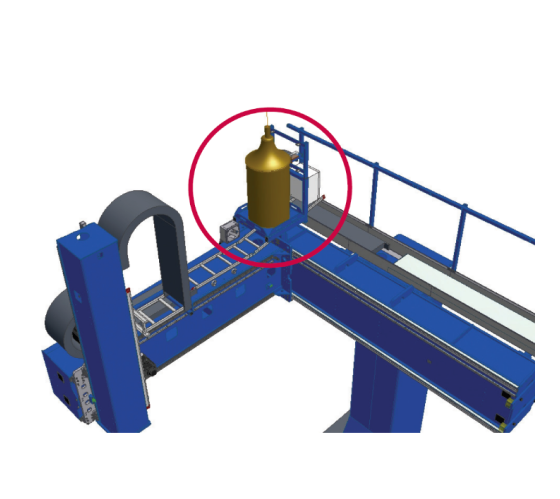
Дополнительное место для установки бухта со сварочной проволокой весом до 320 кг.
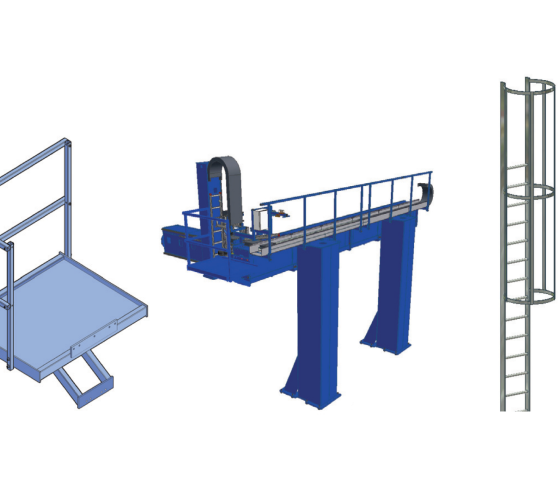
Защитное ограждение, платформы и лестницы обеспечивают высокий уровень защиты.
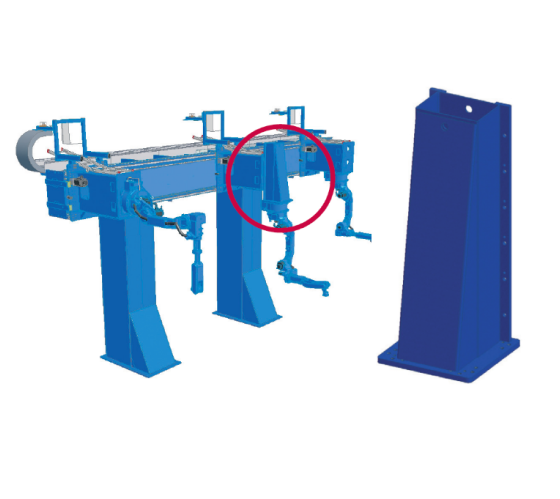
Кронштейн крепления робота увеличивает зону досягаемости комплекса.
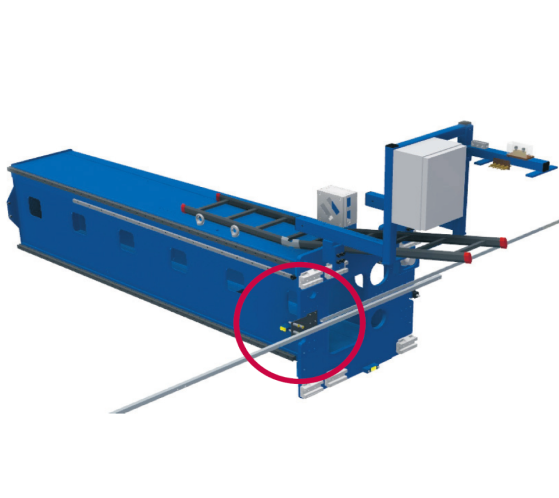
Система контроля рабочих зон, дополнительная норма безопасности.
Дополнительная каретка (механическая, электрическая) со встроенной системой защиты от столкновения с други каретками.

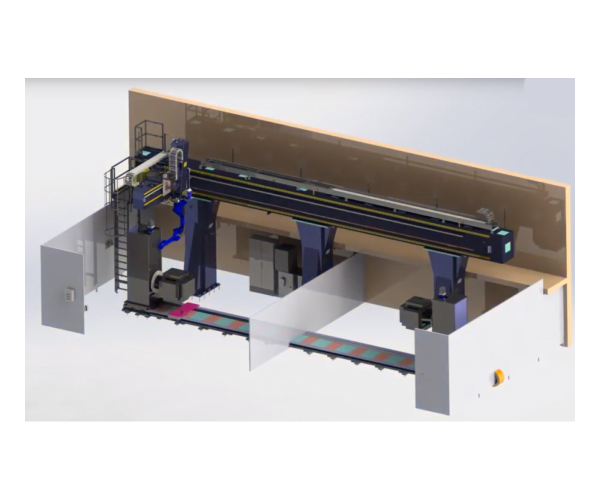
Сварочные комплексы портального типа серии HD
Портал HD предназначен для обеспечения надежных технологических решений сварки металлоконструкции крупногабаритных изделий, таких как экскаваторы, контейнеры и другого объемного оборудования.
Робот имеет большую рабочую зону, так как траектория перемещения по Z-и Y-оси (горизонтальный и вертикальный подъем) имеют длину до 2,5 и 3 метров, а опорные столбы-более 5 метров.
Портал HD работает на сервоприводе и полностью синхронизирован с контроллером робота, что облегчает позиционирование робота для повышения точности сварки и упрощения программирования.
В двойных и тройных системах, где несколько роботов работают на рентгеновском луче, роботы могут работать вместе или независимо друг от друга.
| Технические данные | HD |
| Y-ось | - |
| Стандартная длина перемещения (L), шаг 3 метра, м.: | 6-36 |
| Макс. скорость перемещения, при ПВ 100%, м/с: | 0,5 |
| Ускорение, м/с². | 0,4 |
| X-ось | - |
| Стандартная длина перемещения (L), шаг 3 метра, м.: | 2560, 3100 |
| Макс. скорость перемещения, при ПВ 100%, м/с: | 0,5 |
| Ускорение, м/с². | 0,4 |
| Z-ось | - |
| Стандартная длина перемещения (L), шаг 3 метра, м.: | 2000, 2500 |
| Макс. скорость перемещения, при ПВ 100%, м/с: | 0,27 |
| Ускорение, м/с². | 0,17 |